4.1 クイック再構築
タスク作成
[プロジェクトリスト]ページで  ボタンをクリックするか、既存のプロジェクト内で
ボタンをクリックするか、既存のプロジェクト内で  ボタンをクリックして、自動的にタスク作成ページに移動します。
ボタンをクリックして、自動的にタスク作成ページに移動します。
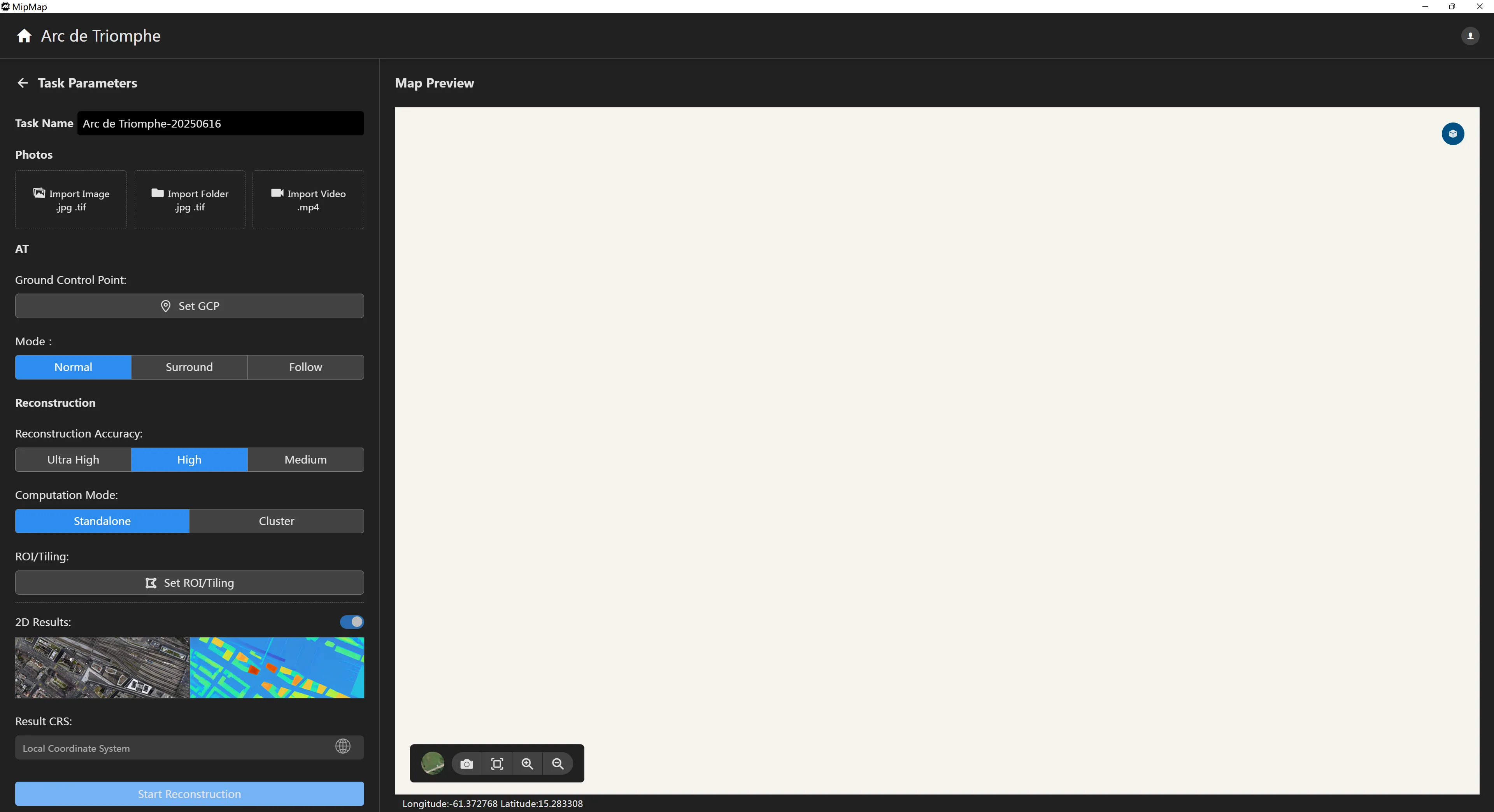
写真のアップロード
「画像をインポート」または「フォルダをインポート」ボタンをクリックし、再構築したい写真を選択して「OK」をクリックします。ソフトウェアは自動的に写真を読み取り、それらから属性情報を取得します。
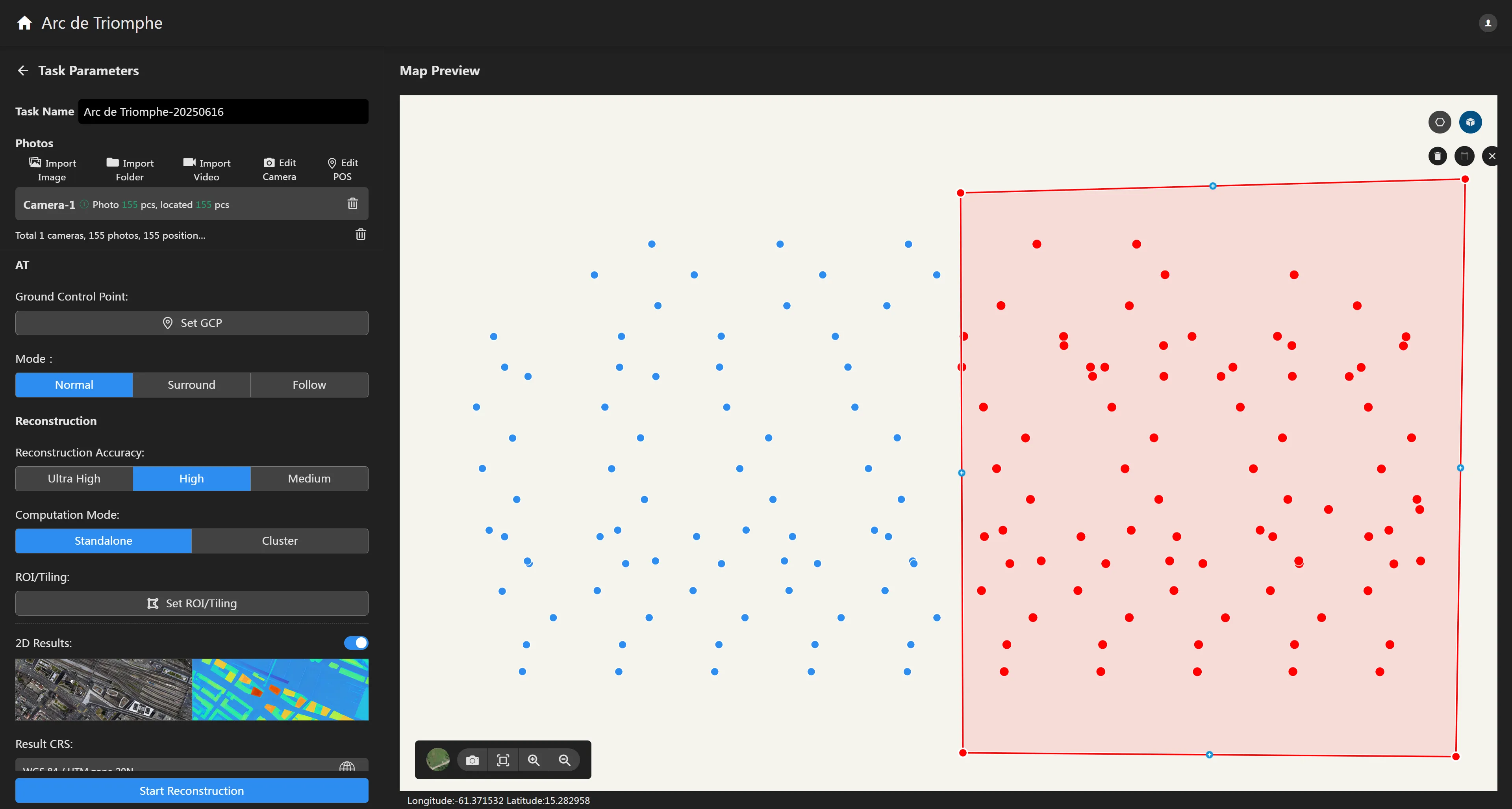
マッププレビューインターフェースで  ボタンをクリックして多角形エリアを描画できます。エリア内またはエリア外の画像データを削除することを選択できます。削除された画像は再構築プロセスに参加しません。
ボタンをクリックして多角形エリアを描画できます。エリア内またはエリア外の画像データを削除することを選択できます。削除された画像は再構築プロセスに参加しません。
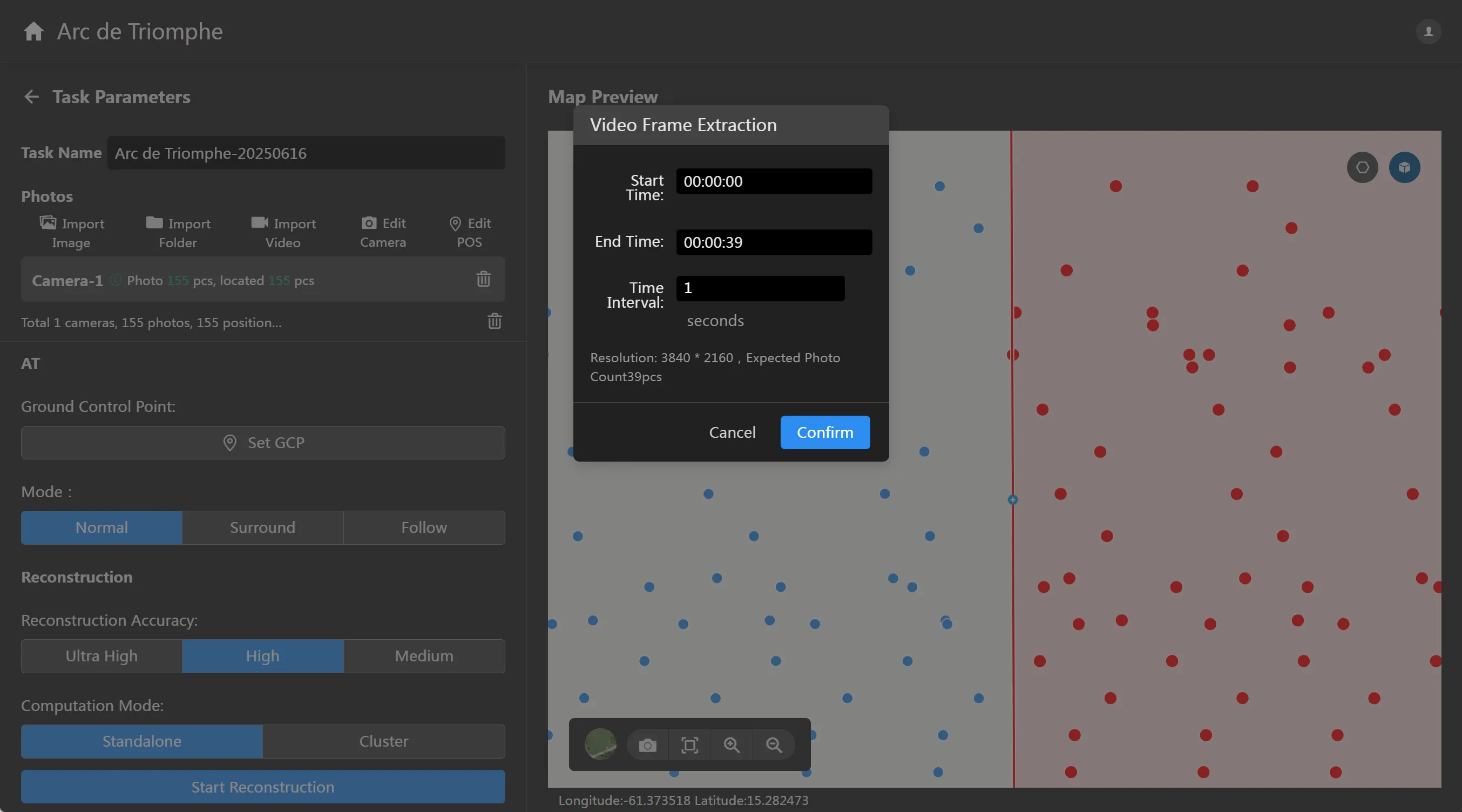
「ビデオをインポート」ボタンをクリックし、再構築したいビデオを選択すると、ビデオフレーム抽出インターフェースが自動的に表示されます。フレーム抽出パラメータを設定した後、「OK」をクリックすると、ソフトウェアは自動的にフレームを抽出して写真を読み取ります。 ビデオファイルディレクトリにビデオPOS情報を含む同名のsrtファイルが含まれている場合、ビデオポーズの自動抽出がサポートされます。
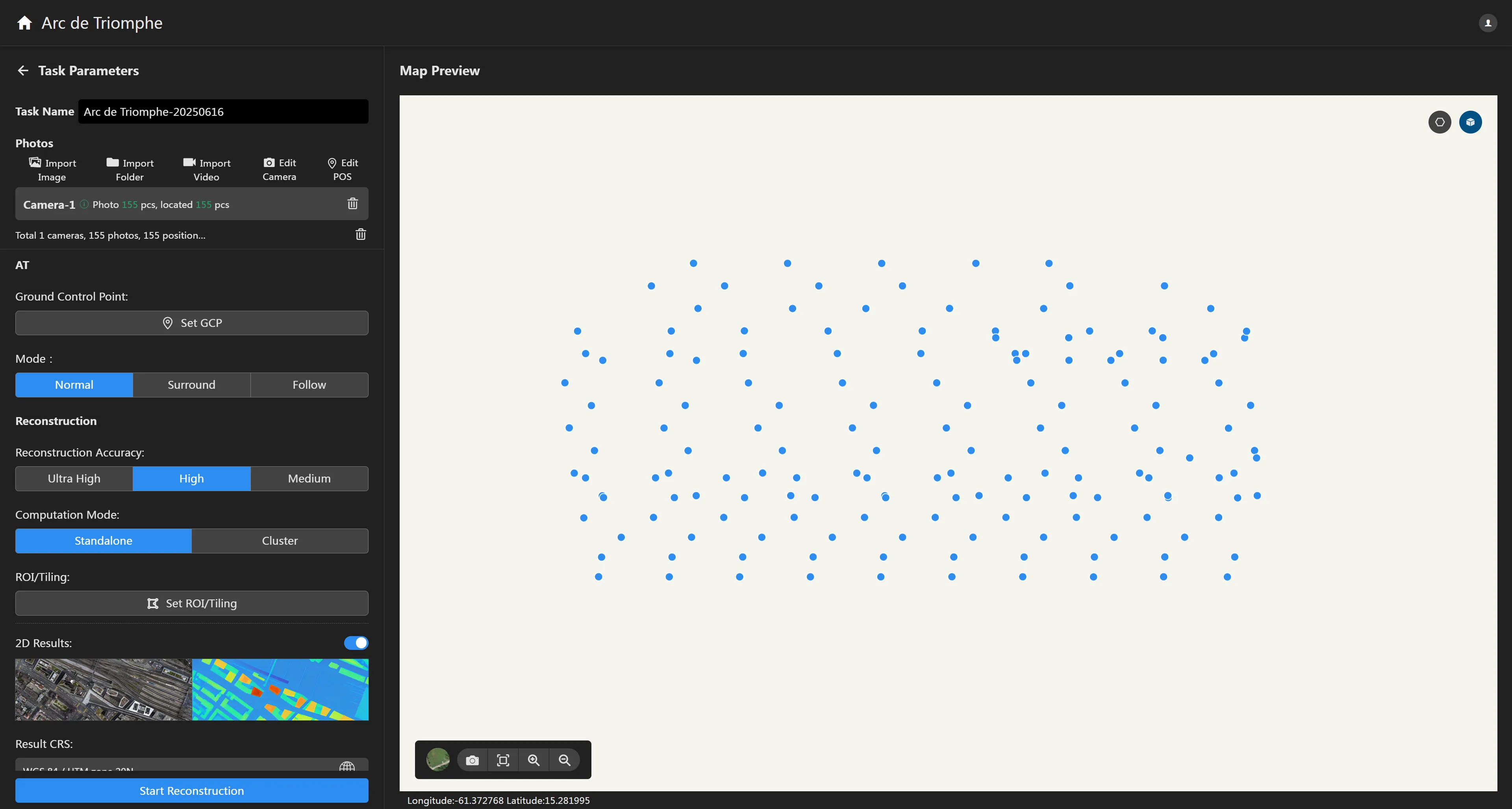
再構築パラメータの設定
写真をインポートした後、ソフトウェアは解析された写真データに基づいてデフォルトの再構築パラメータを自動的に設定します。希望する再構築パラメータを手動で変更することもできます。
- 地上基準点(GCP)の設定: データセットに基準点がある場合、それらをインポートしてGCPマーキングを実行し、空中三角測量の精度を向上させることができます。GCPは通常、空中三角測量が完了した後に設定されます。
- 空中三角測量モード:
- 再構築精度: 再構築精度が高いほど、再構築結果の解像度が高くなりますが、より多くの時間を消費します。逆に、精度が低いほど、再構築速度が速くなります。高、中、低の再構築精度の違いは、元画像に対するリサンプリング解像度にあります:高は元画像と同じ解像度、中は元画像から2倍間隔でリサンプリング(つまり、長さと幅の両方が元画像の1/2)、低は元画像から4倍間隔でリサンプリング(つまり、長さと幅の両方が元画像の1/4)です。例:元画像の長さ×幅が6000×4000の場合、高精度再構築画像の長さ×幅は6000×4000、中精度再構築画像の長さ×幅は3000×2000、低精度再構築画像の長さ×幅は1500×1000になります。
- 計算モード: シングルマシン計算またはクラスター計算を選択できます。クラスター計算には、クラスターサービスが展開されており、クラスター計算の認証を持っている必要があります。
- 関心領域(ROI)/ブロックの設定: 必要に応じて、希望する再構築エリアとブロック方法を設定できます。
- 2D結果: 2D結果には主にデジタルオルソフォトマップ(DOM)とデジタル表面モデル(DSM)が含まれます。このオプションを無効にすると、2D画像結果は出力されません。インポートされた写真に位置情報が含まれていない場合、2D結果は再構築できないことに注意してください。
- 2D結果詳細設定: 2D結果はピラミッド出力、タイル出力、解像度設定の設定をサポートします。タイル出力ではタイル辺長の設定が可能で、解像度は自動または2D結果GSDの手動入力に設定できます。
- 2D結果座標系: デフォルトの出力座標系は任意座標系で、通常はローカル座標系です。座標系をカスタマイズする必要がある場合は、
 をクリックして出力したい座標系を選択できます。
をクリックして出力したい座標系を選択できます。 - 3D結果: 3D結果には主に3Dモデルとポイントクラウドが含まれます。このオプションを無効にすると、3D結果は出力されません。このインターフェースでは、ユーザーは特定のニーズに応じてモデルとポイントクラウドの出力形式を選択できます。B3DM\OSGB\OBJ\PLY形式のモデルとPNTS\OSGB\LAS\PLY形式のポイントクラウドが含まれます。
- 3D結果詳細設定: 3D結果はモデル簡略化率と浮遊オブジェクトの削除の設定をサポートします。モデル簡略化率はデフォルトで100%で、完全なモデルを出力します。
- 3D結果座標系: 2D結果座標系と同様に、デフォルトは任意座標系です。 をクリックしてカスタム座標系に設定できます。
- 標高座標系: 座標系選択ページでは標高システムを選択できます。現在、測地高、1985年国家垂直基準、カスタム標高システムをサポートしています。カスタム標高システムは、tif形式のジオイド起伏ファイルをインポートすることで追加されます。
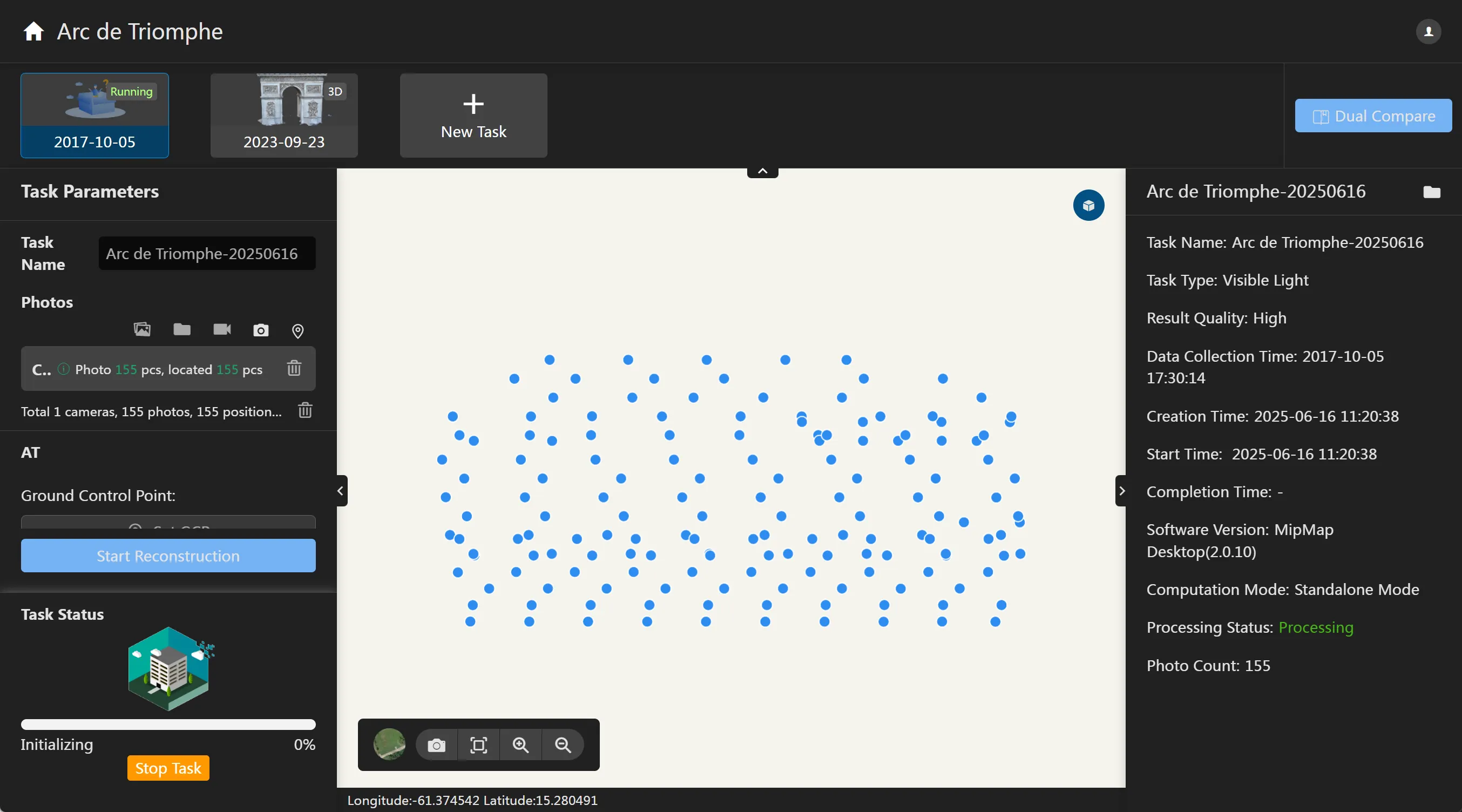
再構築開始
「再構築開始」ボタンをクリックすると、ソフトウェアは自動的に再構築プロセスに入ります。左下隅で、現在のタスク実行段階と進行状況を確認できます。再構築が完了すると、再構築結果が自動的に表示されます。